A4VSO系列伺服變量泵
德國力士樂公司生產的A4VSO變量柱塞泵屬斜盤結構軸向柱塞變量泵,其排量從零到最大無級可調,改變斜盤傾角方向,可改變輸出流量。工程應用一般采取閉式回路,通過自帶并聯齒輪泵作為輔助泵提供備壓,進行補油。其控制方式主要包括:與壓力有關的液壓控制HD、液壓手動伺服控制HW、電氣控制EL、與速度有關的液壓控制DA。
1.伺服變量原理
A4V系列泵的伺服變量系統通過伺服閥,把控制壓力轉變為驅動液壓缸伸出桿的位移,再推動斜盤轉動,以改變泵的排量。因此,該系統為力反饋閉環控制回路。控制油壓力在變化范圍內對應于斜盤傾角(泵的流量)的改變。該伺服系統有結構緊湊、響應快速等優點,易于實現遠程控制。
伺服閥是變量系統中的核心元件,其作用是根據輸入油壓的變化導通控制油路與變量液壓缸的油路,推動變量液壓缸的活塞做直線運動。伺服閥內部結構如圖5所示。

伺服閥為O形三位四通換向閥。主閥心2的中位為關閉狀態,a-Y1、b-Y2都不通,該位變量液壓缸處于靜止狀態,泵不變量;左位(閥心右移)時,導通a-Y1及Y2與回油口;右位時,導通b-Y2及Y1與回油口。力反饋機構主要包括彈簧4、彈簧拉桿3、反饋杠桿8。反饋杠桿將變量液壓缸的位移通過反饋杠桿8、彈簧拉桿3、彈簧4轉變成作用在主閥心上的反饋力Ff。A4V變量泵的變量系統是閉環控制系統,通過力反饋實現斜盤的位置控制。圖6是其變量系統原理圖。

設Ff為彈簧拉力,A0為控制油作用于推桿的有效面積。為了便于說明其工作原理,忽略作用在閥心上的黏性摩擦力、瞬態液動力和穩態液動力的影響,則當主閥心的平衡條件ΔpA0=Ff滿足時,處于中間位置,控制油壓p。不能進入伺服液壓缸;當ΔpA0=Ff=0時,xp=0,則斜盤傾角θ=0,泵的輸出流量為0。
當ΔpA0>Ff時,平衡破壞,主閥心向右運動,伺服閥處于左位機能,壓力為聲。的控制油進入液壓缸左腔,推動活塞向右走;同時,活塞桿推動反饋杠桿逆時針繞C點的固定銷轉動,反饋杠桿帶動左彈簧拉桿向左擺。A點與主閥心固定,因此彈簧拉伸,與Δp方向相反的彈簧力Fh增加,作用在主閥心上的反饋力Ff也增加。當再次達到ΔpA0=Ff時(實際上Ff稍大一些),主閥心回到平衡位置,截斷油路,伺服液壓缸停止運動,斜盤擺角日穩定,液壓泵穩定在某一穩定輸出流量下工作。
當ΔpA0<Ff時,同理可得到類似的結果,只是運動方向相反。
總之,在Δp變化時,主閥心向不同的方向運動,導通不同的油路,使伺服液壓缸做出相應的運動,調節彈簧的拉力,使反饋力Ff與液壓力△pA0最后達到新的平衡。在此平衡后,液壓缸位移Xp和斜盤傾角日得到新的值,液壓泵獲得對應流量的工況與Δp的值一一對應。
2.伺服變量控制模型
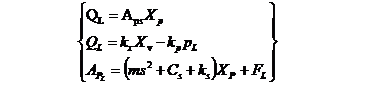
從圖6中可以看出,伺服變量機構為閥控液壓缸系統,系統輸入為控制壓力Δp,輸出為伺服液壓缸活塞位移Xp,因此可以建立該伺服系統的動態方程組Laplace變換式,即
 (9-1)
(9-1)
式中:QL為泵的輸出流量;AP為伺服液壓缸有效截面積;Xv為伺服閥心位移;C為液壓缸的阻尼系數;ks為復位彈簧的剛度;FL為反饋桿作用力;m為伺服液壓缸活塞質量。
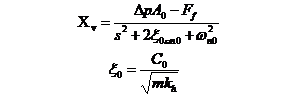
另外,根據伺服閥心的受力平衡,可建立閥心運動方程的Laplace變換式為
 (9-2)
(9-2)
式中:ξ0為閥心阻尼比;m為閥心質量;kh為拉桿彈簧剛度;ωn0為閥心固有振蕩頻率,ωn0=√(kh/m)。
該伺服系統的輸入開環傳遞函數為兩個振蕩環節和兩個比例環節的串聯,負載開環傳遞函數為一個比例環節和一個振蕩環節串聯。系統開環增益大,響應速度快,但參數選擇不當,可能引起超調量過大,穩定速度變慢,甚至產生振蕩,使系統不穩定。
出泵的排量q與斜盤傾角日成正比,θ與伺服液壓缸位移活塞Xp成正比,Xp受壓力△p控制,因此排量q是受△p控制的對象。泵在一定的轉速n下,流量Q與排量q成正比關系。